Micro-g 2018 Challenge Description & Proposal posted in microg
December 01, 2018
The Problem
When astronauts step into space, they enter an environment in which sharp objects are an immediate threat. With highly pressured suits, the slightest wear on a glove can be dangerous, compromising the entire space suit’s integrity. As a result, astronauts at the international space station must take extreme precaution when exiting their ships for space walks. They rely on handrails which help them maneuver outside the ISS. These handrails, which make direct contact with each astronaut’s glove, are susceptible to developing sharp edges, due to the impact of Micrometeoroids and Orbital Debris.
The Mission
To remedy this problem, NASA has proposed a design challenge. The objective of this challenge is to design a method for both detecting sharp edges and removing sharp edges from an Extravehicular Activities handrail.
Some Challenges
When it came to actually sketching a prototype our team recognized the following constraints: The device must be easy to use. Since the astronaut will be wearing clunky gloves, we could not design anything that required intricate handling by the user. Because the device will be tested at the Neutral Buoyancy Laboratory, it must work underwater. This means we have to be very cautious about the materials we chose. The device must work on all three faces of the handrail, each of which is shaped differently. As a result we designed parts that are fitted to the varying concavity of each of the faces.
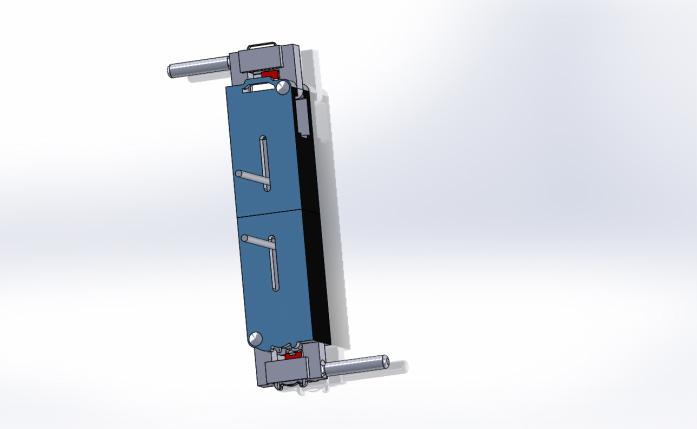
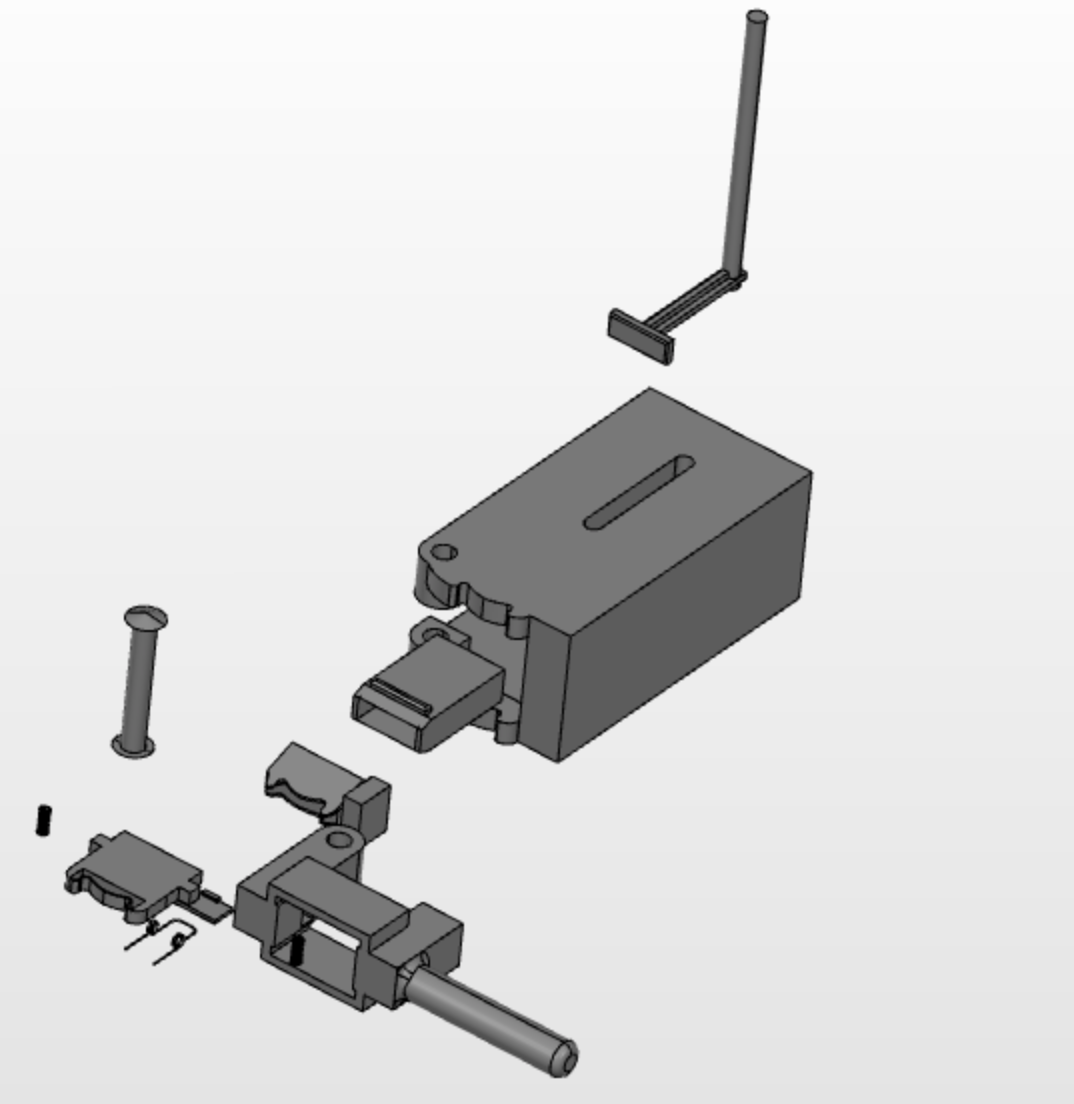
Our Design
Our device utilizes detection bars that slide along the face of the handrail and fit the face’s curvature. When a sharp edge appears on the handrail, the bottom section of the bar is thin enough that it will catch on any sharp protrusions it comes in contact with. When caught, the entire detection bar will be pushed in against two compression springs. As the device continues to move, the latch located on the detection bar will release its grip on a trigger flap, enabling this flap to pop up. This signals the presence of a sharp edge.
When a sharp edge is detected, a red signal appears. This tells the astronaut to lift the device from the railing and move the detection device to the side, which will reveal nozzles that contain fast drying covering paste. As the astronaut depresses the plunger, covering paste is squeezed onto the bar. The astronaut can then drag the device over the area covered to help smooth the covering paste across the face.
Moving Forward
A current design challenge for our team is to design a better way for astronauts to grip the device. Currently the body of the device is cubic and requires astronauts to grip around the body’s edges. We plan to create a covering grip, or shape the body differently, so that is better suited to the shape of the astronauts glove and relies less on grip strength.
As of now, we are moving from the design phase into the prototype phase. We are currently pending acceptance for NASA’s competition at the Johnson Space Center this spring! Wish us luck :)
– Micro-g Team
Liked that post? Check out the news page